S.M. BOUZOUBAA*, A. ZANIFI**, I. BEN YAHYA*
*Département de médecine orale et chirurgie orale
Faculté de médecine dentaire de Casablanca
Université Hassan II - Maroc
** Médecin dentiste du secteur privé
RÉSUMÉ
La navigation dynamique est une technologie révolutionnaire, qui a fait ses preuves dans le domaine médical en général, et dans le domaine d’implantologie dentaire en particulier. Le développement de l’informatique numérique et la diversité des procédés de l’imagerie médicale 3D par CBCT ont permis à cette technologie de générer différents types d’applications médicales et dentaires.
Elle consiste à l'utilisation d'un système dite « passif » qui repose sur une technologie de localisation spatiale ou « motion tracking » ; c'est-à-dire de détection des mouvements. Elle permet au chirurgien de visualiser le forage du site implantaire tout au long de la chirurgie, par le biais des matrices de poursuite fixées sur l’arcade du patient et montées sur le contre angle chirurgical.
A l'unanimité, les systèmes de la navigation dynamique conçus pour l'implantologie dentaire se basent sur un flux de travail commun ; ces systèmes de navigation assistée par ordinateur permettent d’obtenir d’une manière précise le positionnement tridimensionnel de l’implant prédéterminé par la planification pré chirurgicale, à partir de l’imagerie 3D (CBCT).
Cette technologie permet au praticien de mieux appréhender l’anatomie d’une part et d’en percevoir plus facilement les variations. Il lui permet également d’anticiper plus facilement l’ensemble de la chirurgie implantaire. Toutefois, ces applications restent relativement limitées, et pas encore accessibles aux praticiens du secteur privé vu la complexité des protocoles et l’investissement important.
Le potentiel de cette technologie n’est pas entièrement exploré. Des études supplémentaires et des avancées technologiques sont nécessaires pour contribuer à ce que la navigation dynamique contourne ses limites et faciliter le travail du praticien qui puisse jouer un rôle plus important en implantologie.
Mots clés : Implantation dentaire, Chirurgie assistée par ordinateur, Conception assistée par ordinateur, Imagerie tridimensionnelle 3D.
INTRODUCTION
Depuis ses débuts dans les années 1980 et les travaux de Bränemark, l’implantologie est passée d’une démarche centrée sur l’anatomie des bases osseuses à une approche orientée sur sa finalité prothétique. Aujourd‘hui, le « boom » informatique, l’apport de l’outil robotique dans la planification et l’imagerie tridimensionnelle ont transformé la pratique implantaire dans les cabinets dentaires. Les médecins dentistes ont plusieurs options lorsqu'il s'agit d’une chirurgie implantaire. La planification et la pose d'implants dentaires ont bénéficié de l'accélération des capacités technologiques de l'imagerie en cabinet et des logiciels complexes de simulation.
Désormais, l’enjeu principal réside dans le report en bouche de ce projet prothétique qui se doit d'être le plus précis possible en répondant aux impératifs biologiques ou prothétiques.
La combinaison des logiciels et de l'imagerie a permis le développement des guides statiques pour obtenir une précision prévisible dans la pose des implants (1). Dans le même temps, la robotique passive ; appelée navigation dynamique ou encore "image guided navigational implantology" vient d’intervenir et permet d'améliorer ce processus en fournissant aux chirurgiens un outil de navigation en temps réel qui leurs permet un accès direct et sans guide au site opératoire pour le forage et le positionnement des implants pour améliorer la précision de la pose de ces derniers (Fig.1).
 Fig.1 : Chirurgie implantaire par navigation dynamique (1). Fig.1 : Chirurgie implantaire par navigation dynamique (1). |
PRINCIPE
La navigation dynamique est comparable aux systèmes GPS couramment utilisés dans les automobiles et se constitue de trois éléments principaux (Fig.2) (2) :
o Un localisateur / capteur de suivi émetteur d’ondes et de lumière infrarouge, qui est analogue à un satellite dans l'espace,
o Marqueurs ou Matrices de poursuite, qui représentent l'unité GPS dans le véhicule. Ce sont généralement des instruments fixés sur le patient et sur le contre angle de forage implantaire afin de permettre la géolocalisation du patient et des instruments en temps réel,
o Des données radiographiques 3D du patient, comparables à une carte routière.
 Fig.2 : Principe d’un système de navigation dynamique. Fig.2 : Principe d’un système de navigation dynamique. |
La navigation dynamique appelée robotique passive repose sur une technologie de localisation spatiale ou « motion tracking » c'est-à-dire la détection des mouvements par des capteurs ou caméras de suivi capables de capter l'ensemble du champ chirurgical et suivre des marqueurs fixés sur le contre angle et sur l’arcade du patient. Les données sont ensuite transmises et visualisées en temps réel sur l’écran de contrôle (Fig.3).
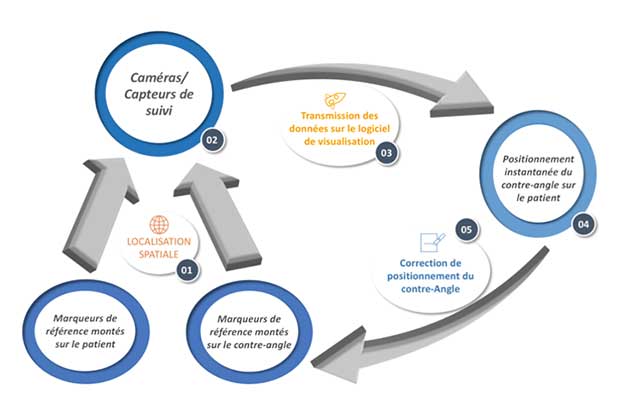
Fig.3 : Principe de localisation spatiale ou « motion tracking ». |
En chirurgie guidée implantaire, plusieurs systèmes de navigations dynamiques ont été exploités pour la conversion de la position d’un marqueur placé sur un instrument en coordonnées. Parmi ces systèmes, on peut citer les systèmes : éléctromécaniques, ultrasoniques, électromagnétiques et optiques ou optoélectroniques (Fig.4). Ces derniers sont les plus utilisés aujourd’hui avec des plafonniers (capteur de suivi) émettant des lumières bleues qui sont ensuite réfléchies par des marqueurs de poursuite fixés sur le patient et le contre angle (3).
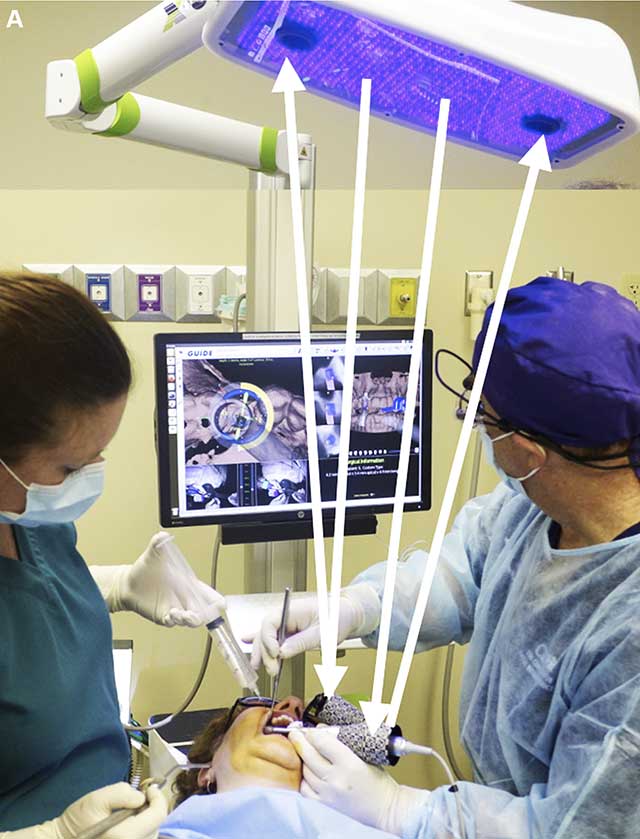
Fig.4 : Système optique de navigation dynamique (3). |
FONCTIONNEMENT
A l'unanimité, les systèmes de la navigation dynamique conçus pour l'implantologie dentaire se basent sur un flux de travail commun. Ces systèmes de navigation assistée par ordinateur permettent d’obtenir exactement le positionnement tridimensionnel de l’implant prédéterminé par la planification pré chirurgicale, à partir de l’imagerie 3D (CBCT) (Fig.5).
Dans le cadre d’une chirurgie par navigation, le praticien confectionne préalablement un petit dispositif personnalisé sur l’arcade du patient. Ce dispositif contient des marqueurs radio-opaques définis dans l’espace tridimensionnel par des coordonnées (x,y,z) uniques est utilisé pour une éventuelle acquisition d’un examen d’imagerie tridimensionnelle, par scanner ou Cone beam.
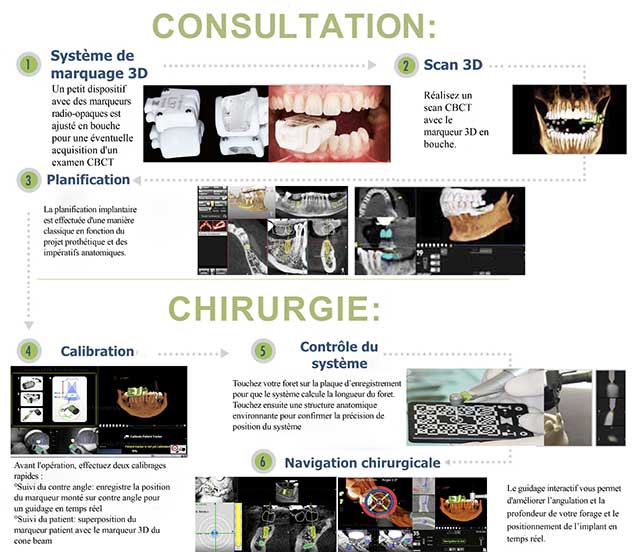 Fig.5. Fonctionnement / Workflow des systèmes de navigation dynamique. Fig.5. Fonctionnement / Workflow des systèmes de navigation dynamique. |
Pour un patient denté, ces systèmes de marquage constituent des guides radiologiques prenant appui sur les dents de la même arcade que l’implant planifié mais du côté opposé pour ne pas gêner le site du forage. Or dans le cas où le patient est édenté, il n’est pas possible de placer le repère en bouche. Ainsi, pour permettre l’acquisition du CBCT avec un repère radio-opaque, le chirurgien vient placer 5 vis d’ostéosynthèse le long de la face vestibulaire de l’arcade concernée par la chirurgie (Fig.6) (4).
Une fois l’examen radiologique réalisé, la planification implantaire est effectuée d’une manière classique en fonction du projet prothétique et des impératifs anatomiques, avant de passer directement à la chirurgie qui ne nécessite qu’une simple calibration et contrôle du système.

Fig.6 : Vis d’ostéosynthèses pour un marquage 3D lors de l’examen radiologique pour un patient édenté (4). |
FORCES DE LA NAVIGATION DYNAMIQUE (ND) : (1,3,5,6,7,8,9,10,11)
Les systèmes de ND conçus pour l'implantologie dentaire n’ont pas cessé d’évoluer et deviennent une option attractive aux praticiens. La navigation assistée par ordinateur présente de nombreux avantages :
• En terme de flexibilité : elle permet au chirurgien de modifier la planification initiale au fur et à mesure de la situation clinique rencontrée.
• En terme de sécurité : le chirurgien et l’assistant(e) opératoire gardent une vision directe sur le site ; et le système permet d’éviter toutes les structures anatomiques à risque. Le rétrocontrôle sur la situation intra-osseuse du forage donne au chirurgien plus d’assurance sur son geste opératoire.
• Flux de travail entièrement numérique : les praticiens sont capables d'examiner le patient, de procéder à l’examen 3D, de planifier la position de l'implant et réaliser l'intervention chirurgicale dans la même journée sans le délai ou le coût de fabrication d'un guide statique ou le recours au laboratoire.
• Réhabilitation prothétique facilitée : avec la ND, les provisoires peuvent être réalisées en utilisant le système dynamique pour placer des analogues d'implants dans un modèle pour la fabrication de provisoires. La fabrication de provisoire avant la mise en place chirurgicale permet la restauration immédiate des implants.
• En termes de précision : les systèmes de navigation ont un écart d’entrée moyen de 0,4mm et un écart angulaire d’environ 4 degrés ; ce qui permet un positionnement très précis des implants.
• Interventions mini-invasives : la ND apporte tous les avantages de la chirurgie sans lambeau ou dite chirurgie « Flapless », liées à la non mobilisation du lambeau, à la diminution des risques infectieux et hémorragique, ainsi que de la résorption systématique après pose.
• En termes d’accessibilité et pratique opératoire : Il est également rapporté que l’utilisation d’un navigateur permet d’éviter l’encombrement du guide statique. De ce fait, le chirurgien dispose d’une vision directe et d’une irrigation facilitée sur le site du forage même chez des patients à ouverture buccale limitée ou dans les cas d'implantation postérieure avec une visibilité difficile. Il permet également de guider la pose d’implant lorsque les espaces inter dentaires interdisent un guidage approprié avec des guides statiques, comme dans la région de l'incisive mandibulaire.
• Position ergonomique optimale : le praticien profite d’une vision indirecte sur l’ensemble du champ opératoire représenté sur le moniteur. Il en résulte alors une moindre tension sur le dos et le cou et un meilleur confort pour aussi bien le patient que le médecin.
LIMITES ET ENJEUX DE LA NAVIGATION DYNAMIQUE : (1,9,12,13,14,15,16,17)
Cependant, même avec ces aspects positifs il est nécessaire de mettre en balance ces points positifs avec quelques inconvénients et limites inhérents aux systèmes de navigation :
• Courbe d’apprentissage : La courbe d'apprentissage fait référence à l'accumulation d'expériences par la répétition d'une activité pour comprendre la corrélation entre la durée de l'apprentissage et le changement de comportement. Elle constitue un réel frein dans l’utilisation d’un tel système. Les études de Block et al (6) préconisent environ 20 cas pour une maitrise suffisante du système.
• Coût financier initial : La ND nécessite un investissement important pour le chirurgien. En plus du CBCT et d'un système d’exploitation « IOS », il y a le coût d'investissement du système. Bien qu’il ait été fortement revu à la baisse depuis une dizaine d’années, il faut aujourd’hui compter entre 20 000 € (200 000 DHS) et 30 000 € (300 000 DHS) pour faire l’acquisition d’un navigateur. Il faut également compter le coût par cas selon le kit pour chaque patient qui comprend des marqueurs 3D, des plaques, etc. Toutefois, à long terme la navigation dynamique devient économique car il n’y a plus de coût de laboratoire à prévoir pour chaque intervention.
• Risque d’effet entonnoir : La chirurgie guidée se base sur le principe de garder un geste régulier par de multiples autocorrections retransmises en temps réel. Par conséquent, le praticien peut tomber dans l’erreur d’élargir l’entrée du forage et ainsi diminuer la stabilité primaire de l’implant.
• Temps préopératoire augmenté : La mise en œuvre du système encore volumineux dans la salle opératoire, l’étalonnage avant la chirurgie et la préparation du matériel prend un temps important et nécessite un repositionnement précis des matrices de poursuites et la validation de leurs positions.
• Morbidité chez le patient édenté : pour les patients édentés, le processus de ND nécessite une chirurgie supplémentaire de mise en place de vis d’ostéosynthèse et de plaques de suivi sur l’ensemble du procès alvéolaire de l’arcade. Ces vis constituent le repère radio-opaque de l’édenté mais ne présentent pas d’attache pour le marqueur du patient.
• Complications techniques : la ligne de visée entre la caméra stéréoscopique et les matrices de poursuites doit être claire à tout moment. Les opérateurs et les assistants doivent donc être vigilants et éviter de se de se placer ou de placer un instrument chirurgical dans cette ligne de visée et par conséquent masquer ces dispositifs dont la forme et la position doivent être optimisées. De plus, une bascule du marqueur 3D du patient, fixé en bouche, entraînerait une altération des repères rendant impossible le suivi.
COMPARAISON ENTRE LES DIFFERENTS SYSTEMES D’ASSISTANCE EN IMPLANTOLOGIE :
Une méthode est nécessaire pour perfectionner la pose d'implants pour chaque cas. Cette méthode doit être précise, avoir un flux de travail pratique pour le chirurgien et une courbe d'apprentissage raisonnable pour atteindre la maîtrise de la méthode.
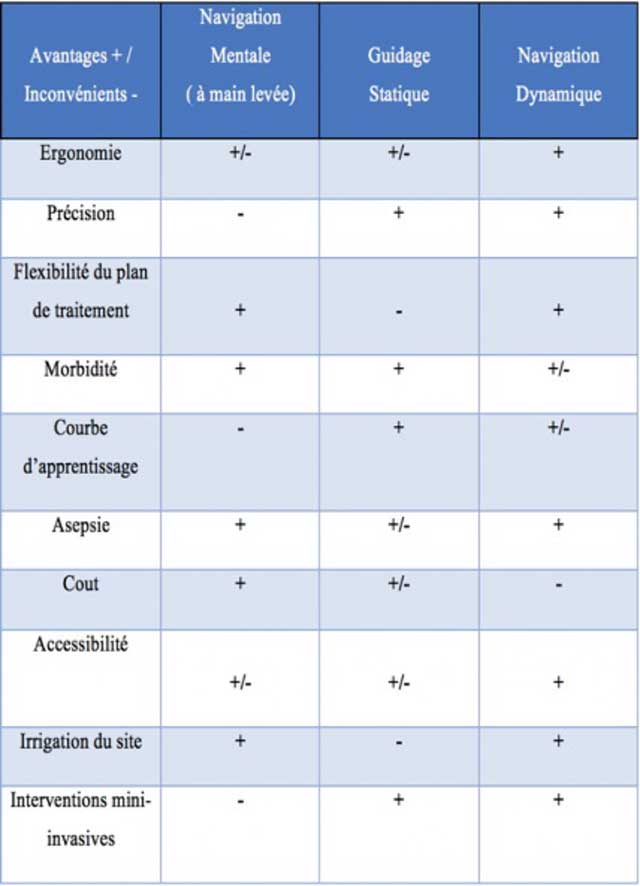
Ainsi, en fonction des éléments trouvés dans les différentes études, il est possible de réaliser un récapitulatif des avantages et inconvénients des systèmes de navigation dynamique par rapport au guidage statique et la navigation mentale (à main levée) (Tableau 1).
Tab.1 : Avantages et inconvénients des systèmes de d’assistance de positionnement en chirurgie implantaire. |
En outre, les études révèlent que : (1,3,6,18,19)
• En terme d’ergonomie : au cours de la chirurgie, la ND permet au praticien de rester concentré sur l’écran de contrôle en lui permettant d’adopter une position ergonomique optimale par rapport à celle utilisant les guides statiques ou à main levée.
• En terme de précision : La ND est aussi précise que le guidage statique et présente une grande amélioration de précision par rapport à la navigation mentale.
• En terme de flexibilité du plan de traitement : à la différence des systèmes de guidage statique ; la force du système passif est la capacité de changer ou d’ajuster la planification initiale au cours de l’intervention, en fonction de ce que constate l’opérateur.
• En terme de morbidité : Les études indiquent une certaine morbidité augmentée avec la ND chez le patient édenté. En effet, il est nécessaire de positionner des vis d’ostéosynthèse sur l’ensemble du procès alvéolaire de l’arcade, pour positionner la matrice de poursuite patient en peropératoire, ce qui explique un caractère invasif de la ND. Par contre en guidage statique dont la planification est totalement digitale, on n’a pas de recours à une chirurgie supplémentaire.
• En terme d’apprentissage : les études montrent que le praticien pourra maitriser l’utilisation du système ND après la pose d’une vingtaine d’implants. Par contre, le guidage statique nécessite que le praticien s’habitue à l’utilisation de logiciel de planification.
• En terme d’asepsie : Le fait d’utiliser des instruments et marqueurs de ND stériles à usage unique présente un grand avantage par rapport aux guides statiques qui peuvent être uniquement désinfectés.
• En terme de coût : Concernant la navigation dynamique, le coût est d’abord initial de l’achat du système de navigation (chariot, moniteur, logiciel…) puis se rajoutent les frais pour chaque cas (kit des marqueurs, plaques…). Par contre, pour la chirurgie guidée statique, on ne peut compter que les frais de planification et de conception du guide chirurgical.
• En terme d’accessibilité : l’utilisation d’un système ND permet d’éviter l’encombrement dû à la mise en place du guide statique. De ce fait, l’accès devient plus facile pour les secteurs postérieurs et permet une meilleure approche des secteurs encastrés. En cas d’ouverture limitée ou d’un site distant (par ex la 2éme molaire supérieure), le chirurgien dispose d’une vision indirecte de l’ensemble du site grâce au système ND à la différence de la navigation mentale.
AVANCÉES TECHNOLOGIQUES : (20,21,22)
Au cours des dernières années, l'industrie dentaire mondiale a rapidement adopté la technologie de navigation dynamique en raison de sa capacité à fournir des résultats plus précis en matière d'implants dentaires.
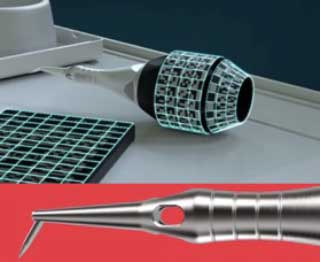
Fig.7 : La sonde X-mark du système de X-Guide®. |
Certains systèmes innovants ont développé une sonde (ex : la sonde X-Mark), qui offre un processus révolutionnaire pour faciliter l'enregistrement virtuel de l'anatomie du patient sur un Cone beam ; permettant d’avantage au médecin dentiste d'offrir une chirurgie naviguée moins invasive et beaucoup plus rapide (Fig.7).
Le flux de travail, consiste dans un premier temps à la réalisation d’un Cone beam, dont les surfaces osseuses et dentaires seront soulignées automatiquement par le logiciel de la ND grâce à un algorithme (Fig.8). Le médecin dentiste se préparera à la chirurgie en marquant trois points d'anatomie virtuelle sur le scan 3D/Cone beam du patient (Fig.9). Dans un 2ème temps, le praticien marquera les trois mêmes points réels sur le patient au moment de la chirurgie (Fig.10).
Le système va réaliser une superposition rapide des points sélectionnés au niveau du Cone beam et du patient. Ce qui va permettre à la chirurgie de démarrer immédiatement.

Fig.8 : Soulignement automatique des surfaces osseuses et dentaires par le logiciel de planification.
|
|
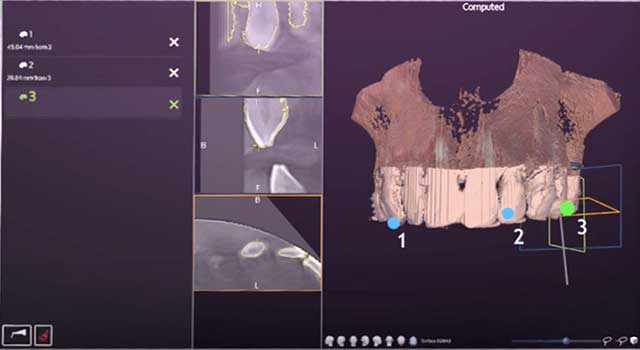
Fig.9 : Marquage des trois points virtuels sur le Cone beam.
|
|

Fig.10 : Marquage des trois mêmes points réels sur le patient au moment de la chirurgie. |
|
CONCLUSION
La navigation dynamique est une technologie révolutionnaire qui a fait ses preuves dans le domaine médical en général, et dans le domaine dentaire en particulier. En clinique, la chirurgie assistée à l’aide de navigation dynamique aide le praticien de surmonter les limites de la vision humaine et d'augmenter l'exactitude et la précision de la pose des implants. Elle permet au chirurgien de mettre en œuvre des plans de traitement implantaire numériques de manière efficace et flexible. Cependant, les applications de navigation dynamique en implantologie restent relativement limitées, et sont réduites à certains procédés chirurgicaux.
BIBLIOGRAPHIE
1. Panchal N, Mahmood L, Retana A, Emery R. Dynamic Navigation for Dental Implant Surgery. Oral Maxillofac Surg Clin N Am. nov 2019;31(4):539‑47.
2. Bell RB. Computer Planning and Intraoperative Navigation in Cranio-Maxillofacial Surgery. Oral Maxillofac Surg Clin N Am. févr 2010;22(1):135‑56.
3. Block MS, Emery RW. Static or Dynamic Navigation for Implant Placement-Choosing the Method of Guidance. J Oral Maxillofac Surg Off J Am Assoc Oral Maxillofac Surg. févr 2016;74(2):269‑77.
4. Emery RW, Merritt SA, Lank K, Gibbs JD. Accuracy of Dynamic Navigation for Dental Implant Placement–Model-Based Evaluation. J Oral Implantol. 1 oct 2016;42(5):399‑405.
5. Block MS, Emery RW, Cullum DR, Sheikh A. Implant Placement Is More Accurate Using Dynamic Navigation. J Oral Maxillofac Surg. juill 2017;75(7):1377‑86.
6. Block MS, Emery RW, Lank K, Ryan J. Implant Placement Accuracy Using Dynamic Navigation. Int J Oral Maxillofac Implants. févr 2017;32(1):92‑9.
7. D’haese J, Ackhurst J, Wismeijer D, De Bruyn H, Tahmaseb A. Current state of the art of computer-guided implant surgery. Periodontol 2000. févr 2017;73(1):121‑33.
8. Gopinadh A, Devi KNN, Chiramana S, Manne P, Sampath A, Babu MS. Ergonomics and musculoskeletal disorder: as an occupational hazard in dentistry. J Contemp Dent Pract. 1 mars 2013;14(2):299‑303.
9. Jeffroy PK. DIPLOME D’ETAT DE DOCTEUR EN CHIRURGIE DENTAIRE. :125.
10. Sun Y, Luebbers H-T, Agbaje JO, Schepers S, Politis C, Slycke SV, et al. Accuracy of Dental Implant Placement Using CBCT-Derived Mucosa-Supported Stereolithographic Template. Clin Implant Dent Relat Res. 2015;17(5):862‑70.
11. Wittwer G, Adeyemo WL, Schicho K, Gigovic N, Turhani D, Enislidis G. Computer-guided flapless transmucosal implant placement in the mandible: a new combination of two innovative techniques. Oral Surg Oral Med Oral Pathol Oral Radiol Endod. juin 2006;101(6):718‑23.
12. Sun T-M, Lan T-H, Pan C-Y, Lee H-E. Dental implant navigation system guide the surgery future. Kaohsiung J Med Sci. janv 2018;34(1):56‑64.
13. Herklotz I, Beuer F, Kunz A, Hildebrand D, Happe A. Navigation in implantology. Int J Comput Dent. 2017;20(1):9‑19.
14. Kang S-H, Lee J-W, Lim S-H, Kim Y-H, Kim M-K. Verification of the usability of a navigation method in dental implant surgery: in vitro comparison with the stereolithographic surgical guide template method. J Cranio-Maxillo-fac Surg Off Publ Eur Assoc Cranio-Maxillo-fac Surg. oct 2014;42(7):1530‑5.
15. Somogyi-Ganss E, Holmes HI, Jokstad A. Accuracy of a novel prototype dynamic computer-assisted surgery system. Clin Oral Implants Res. août 2015;26(8):882‑90.
16. Jokstad A, Winnett B, Fava J, Powell D, Somogyi-Ganss E. Investigational Clinical Trial of a Prototype Optoelectronic Computer-Aided Navigation Device for Dental Implant Surgery. Int J Oral Maxillofac Implants. mai 2018;33(3):679‑92.
17. Vercruyssen M, Fortin T, Widmann G, Jacobs R, Quirynen M. Different techniques of static/dynamic guided implant surgery: modalities and indications. Periodontol 2000. oct 2014;66(1):214‑27.
18. Jeffroy K.Chirurgie guidée en implantologie orale : choisir entre le guide statique et la navigation dynamique - Revue systématique.
19. Tregouët Y-M. Intérêt clinique de la navigation implantaire dynamique: le point sur la littérature. :77.
WEBOGRAPHIE
21. https://x-navtech.com/new-x-mark-technology/
22. https://www.nobelbiocare.com/en-int/x-guide





